[MLA-1135] Physics sensors - optional reference body #4276
Conversation
|
|
||
| [assembly: InternalsVisibleTo("Unity.ML-Agents.Editor.Tests")] | ||
| [assembly: InternalsVisibleTo("Unity.ML-Agents.Editor")] | ||
| [assembly: InternalsVisibleTo("Unity.ML-Agents.Extensions")] |
There was a problem hiding this comment.
Possibly controversial; I added this to get timers. But it's something we could use in the future, e.g. public actuators in extensions, but keep IActuator internal.
|
|
||
| //Get velocities in the context of our orientation cube's space | ||
| //Note: You can get these velocities in world space as well but it may not train as well. | ||
| sensor.AddObservation(orientationCube.transform.InverseTransformDirection(bp.rb.velocity)); |
There was a problem hiding this comment.
Corresponds to model space velocity
| //Get velocities in the context of our orientation cube's space | ||
| //Note: You can get these velocities in world space as well but it may not train as well. | ||
| sensor.AddObservation(orientationCube.transform.InverseTransformDirection(bp.rb.velocity)); | ||
| sensor.AddObservation(orientationCube.transform.InverseTransformDirection(bp.rb.angularVelocity)); |
There was a problem hiding this comment.
No direct correspondence, but removing it didn't seem to hurt much. I also need to convince myself that you can just transform angular velocities like that.
| sensor.AddObservation(orientationCube.transform.InverseTransformDirection(bp.rb.angularVelocity)); | ||
|
|
||
| //Get position relative to hips in the context of our orientation cube's space | ||
| sensor.AddObservation(orientationCube.transform.InverseTransformDirection(bp.rb.position - body.position)); |
There was a problem hiding this comment.
Corresponds to model space positions
|
|
||
| if (bp.rb.transform != body) | ||
| { | ||
| sensor.AddObservation(bp.rb.transform.localRotation); |
There was a problem hiding this comment.
Corresponds to local space rotations
There was a problem hiding this comment.
are these decisions that could have been made with the help of the tool @andrewcoh was talking about for saliency?
There was a problem hiding this comment.
In this case, I removed everything from CollectObservations that had an equivalent in the sensor.
In general, we could turn everything on in the sensor, run the tool to see what's important, and then disable unimportant stuff. However:
- It could be tedious to attribute a particular index in the tool to a specific option in the sensor.
- The tool might be too fine-grained. For example, if it said that the w component of one quaternion wasn't relevant, we couldn't just turn that one off. Or if local space velocities was only relevant for one body, we couldn't keep that one but disable the rest.
com.unity.ml-agents.extensions/Runtime/Sensors/PhysicsSensorSettings.cs
Outdated
Show resolved
Hide resolved
| propertyPath: targetToLookAt | ||
| value: | ||
| objectReference: {fileID: 7802320107249901494} | ||
| - target: {fileID: 4622120667686875944, guid: 0456c89e8c9c243d595b039fe7aa0bf9, |
There was a problem hiding this comment.
Hmm, don't think I meant to override this. Now I need to double check the model settings
|
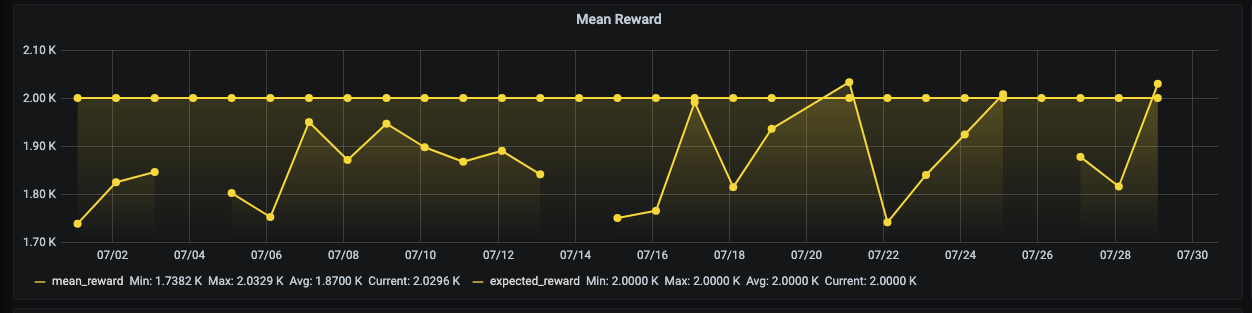
Training times and rewards: master
this branch
I'm going to retrain the crawlerstatictarget scene again tonight; I got some prefabs mixed up so it was using different settings (added local space velocities too). Hopefully that will bring the training time down and the reward up a bit. Also note that for crawlerstatictarget, master is above the expected reward and below on this branch. However, the reward on master is the outlier (unusually good) if we look at the last few weeks of data: |
com.unity.ml-agents.extensions/Runtime/Sensors/PoseExtractor.cs
Outdated
Show resolved
Hide resolved
com.unity.ml-agents.extensions/Runtime/Sensors/PhysicsSensorSettings.cs
Outdated
Show resolved
Hide resolved
| /// </summary> | ||
| /// <param name="index"></param> | ||
| /// <param name="val"></param> | ||
| public void SetPoseEnabled(int index, bool val) |
There was a problem hiding this comment.
SetPoseEnabled is only used to make sure the Virtual Root is not being observed right? I did not see being used elsewhere. Making it public might be dangerous, dot sure what would happen if the user called SetPoseEnabled in the middle of training.
Also, nothing to do with Enabled / Disabled GameObjects right?
There was a problem hiding this comment.
At the moment, it's only used on the root (virtual or otherwise). But I was to add a custom Editor to expose it per-body. For example, on the Worm scene, the eyes are actually rigid bodies constrained to the head, with locked linear motion and free angular motion:
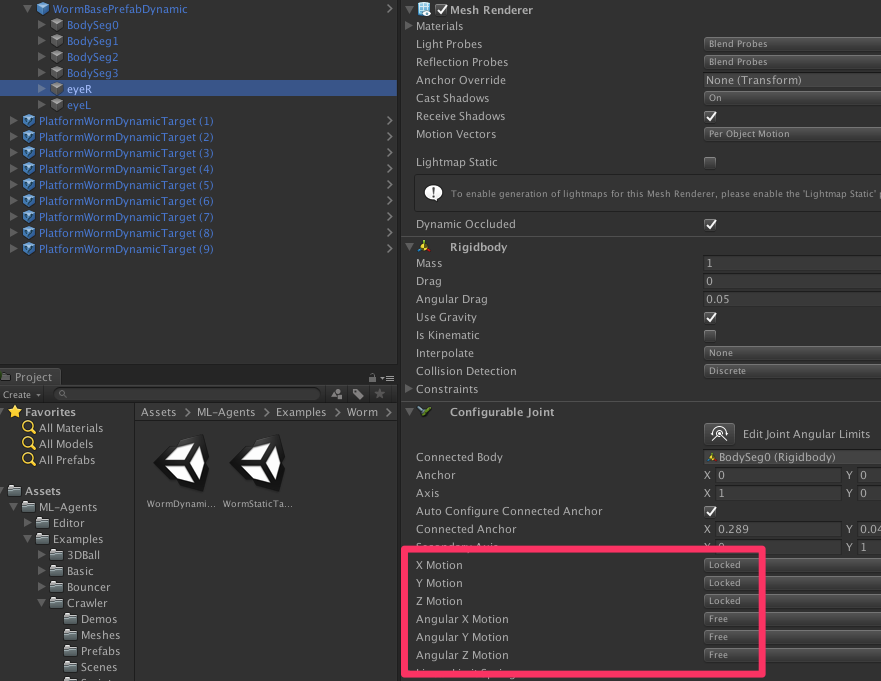
We would basically be wasting observations on those, so I'd like to be able to filter them out.
For now, I'd prefer to keep things more accessible, and tighten up the visibility if we move to the core package.
Correct, nothing to do Enabled / Disabled GameObjects. I hadn't thought about that - is there a better name that would make this more obvious?
| /// </summary> | ||
| /// <param name="parentIndices"></param> | ||
| protected void SetParentIndices(int[] parentIndices) | ||
| protected void Setup(int[] parentIndices) |
There was a problem hiding this comment.
should the assumption be checked since this is a protected method on a public class?
|
|
||
| /// <inheritdoc/> | ||
| protected override Vector3 GetLinearVelocityAt(int index) | ||
| protected internal override Vector3 GetLinearVelocityAt(int index) |
There was a problem hiding this comment.
why the internal addition?
There was a problem hiding this comment.
Wanted to be able to assert on it
| // * go2 | ||
| // - rb2 | ||
| // - joint | ||
| var virtualRoot = new GameObject("I am vroot"); |
Proposed change(s)
Followup:
Useful links (Github issues, JIRA tickets, ML-Agents forum threads etc.)
https://jira.unity3d.com/browse/MLA-1135
https://jira.unity3d.com/browse/MLA-1166
https://jira.unity3d.com/browse/MLA-1167
Types of change(s)
Checklist
Other comments